
关键词:机器人,
来源:互联网 2021-10-13
双足的外骨骼机器人怎么又可以像带轮子的车一样向前运行呢,同时又可以像双足机器人一样上楼梯?看看这个双足外骨骼轮式机器人就明白了。
在平路上,该外骨骼机器人是通过驱动轮滚动式的前行,前面2个小轮子作为支撑轮,在遇到楼梯的时候,前面两个轮子收起变为双足机器人开始爬楼梯,可以适应于带楼梯的路面环境,给行动不便的和需要负重的人带来更多的便利用途。

车辆模式
该外骨骼机器人的两种模式只需一个按钮即可激活,在车辆模式下可在平坦路面快速移动,在双腿模式下,变成一对动力外骨骼的腿,让使用者可以上下行走楼梯。

双腿模式
同时该款外骨骼机器人也配备了摄像头和人工智能算法,可以检测和避开在运行中碰到的障碍物。在功能上可以帮助搬运和移动重物,使人们能够在搬重物的时可以快速不费力地四处走动,同时也可以作为行动不便的人的行走和康复的工具,具有非常好的应用场景。

上楼梯状态
那么在外骨骼机器人的驱动电机的研发上,深圳小象电动研发一款电机和减速器横向排列的外骨骼机器人关节伺服电机系统,采用轴向磁场电机做为主动力电机,通过侧向传动机构传递至减速器输出,实现了超扁平化大扭矩输出的外骨骼关节电机系统。
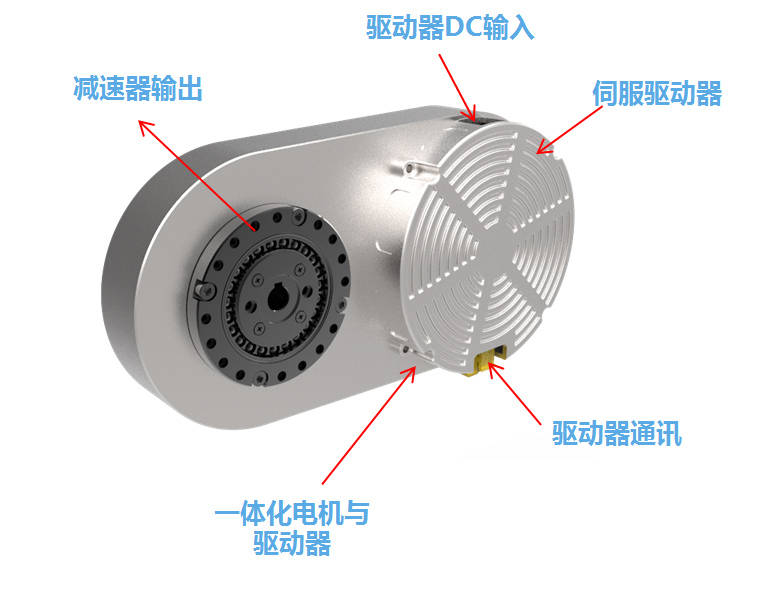
超薄一体化外骨骼关节
为什么采用轴向磁场电机作为该方案的动力电机呢?
因为轴向磁场电机本身具有轴向尺寸小、重量轻和大扭矩的性能优势,非常适合应用于外骨骼关节电机系统的应用,该外骨骼关节电机系统最大输出扭矩可达80Nm,但重量仅为1kg,充分发挥了轴向磁场电机的大扭矩性能特性,在机器人上的应用非常广泛。

在微信里搜索“Chinaecnet”或
在手机上扫描二维码
添加中电网微信账号